Kamera samochodowa: oko autonomicznej jazdy
Kamery montowane w samochodach nazywane są „oczami autonomicznej jazdy” i stanowią podstawowy sprzęt wykrywający w systemie ADAS i w obszarze pojazdów autonomicznych.Główną funkcją zbierania informacji o obrazie są soczewki i czujniki obrazu, które mogą osiągnąć percepcję wzrokową 360 ° i kompensować niedociągnięcia radaru w rozpoznawaniu obiektów.Jest to czujnik najbliższy ludzkiemu wzrokowi.
Kamery montowane w samochodach są szeroko stosowane w branży motoryzacyjnej, stopniowo rozszerzając się od wczesnego użycia do nagrywania jazdy, obrazowania obrazu cofania i widoku otoczenia podczas parkowania, aż do inteligentnego rozpoznawania zachowań w kokpicie i prowadzenia pojazdów wspomaganych przez ADAS, z coraz bardziej zróżnicowanymi scenariuszami zastosowań.
Obecny CR3 globalnego przemysłu kamer samochodowych wynosi 41%, a dziesięć największych firm zajmuje 96% udziału w rynku.Koncentracja światowego przemysłu kamer samochodowych jest na wysokim poziomie.
Highway Loss Data Institute (HLDI) przewiduje, że do 2030 roku prawie 50% samochodów będzie wyposażonych w technologię ADAS.
Według ICVTank oczekuje się, że do 2025 r. wielkość chińskiego przemysłu kamer samochodowych osiągnie 23 miliardy, przy CAGR na poziomie 30% w ciągu najbliższych pięciu lat;Oczekuje się, że światowy rynek kamer samochodowych wzrośnie z 11,2 miliarda dolarów w 2019 r. do 27 miliardów dolarów w 2025 r., przy 5-letnim CAGR na poziomie 15,8%.
Automatyczne prowadzenie pojazdu obejmuje percepcję, ocenę i wykonanie, a percepcja jest źródłem całego procesu i ważnym modułem układu automatycznego napędu.Podczas jazdy pojazdem system percepcji będzie zbierał w czasie rzeczywistym informacje o otaczającym środowisku za pomocą czujników, co jest odpowiednikiem „oczu” pojazdu autonomicznego i może pomóc pojazdowi osiągnąć podobną zdolność obserwacji ludzkiego kierowcy.
W pojazdach autonomicznych system percepcji składa się głównie z czujników, takich jak kamery, radary działające na falach milimetrowych i LiDAR (opcjonalnie, głównie ze względu na obawę przed rozproszeniem uwagi).Jako główny czujnik postrzegania otoczenia, kamera odgrywa bardzo ważną rolę w uzyskaniu kompleksowej percepcji wzrokowej 360 °, kompensując niedociągnięcia radaru w rozpoznawaniu obiektów i jest czujnikiem najbliższym ludzkiemu widzeniu.Dlatego kamery samochodowe są jednym z kluczowych urządzeń w zakresie jazdy autonomicznej.
Co to jest kamera samochodowa?
Główna struktura sprzętowa kamer montowanych w samochodach obejmuje soczewki optyczne (w tym soczewki optyczne, filtry, folie ochronne itp.), czujniki obrazu, procesory sygnału obrazu (ISP), serializatory, złącza i inne komponenty.Schematyczny diagram jego struktury pokazano na rysunku:
Anatomia modułu kamery montowanej w samochodzie
Powyższy obrazek przedstawia budowę modułów kamer powszechnie stosowanych w samochodach.Oprócz najbardziej zewnętrznej obudowy aluminiowej, pierścienia uszczelniającego i soczewki, w rzeczywistości istnieje stosunkowo prosta konstrukcja z kilkoma warstwami pośrodku, zwykle obejmującymi płytkę czujnika czujnika, małą płytkę procesora obrazu i płytkę procesora obrazu. serializator.Serializator jest potrzebny, ponieważ zazwyczaj magistrala wyjściowa danych obrazu z czujników kamery lub dostawców usług internetowych jest standardowa i charakteryzuje się dużą szybkością, ale odległość magistrali transmisyjnej jest krótka, w przeciwnym razie nie można zagwarantować integralności sygnału.
Zatem w pojeździe musimy go przekonwertować na standardy szybkich autobusów, takie jak GMSL, które są odpowiednie do transmisji na duże odległości w pojeździe, więc moduł kamery zwykle konwertuje się na magistralę poprzez kartę szeregową.Ponadto kable koncentryczne można wykorzystać do zasilania modułów i przesyłania danych obrazowych.
Soczewka optyczna: odpowiedzialna za skupianie światła i rzutowanie obiektów znajdujących się w polu widzenia na powierzchnię nośnika obrazu.W zależności od wymagań dotyczących efektu obrazowania może być konieczne zastosowanie wielu warstw soczewek optycznych.Filtry mogą odfiltrowywać pasma światła, które nie są widoczne dla ludzkiego oka, pozostawiając w polu widzenia ludzkiego oka jedynie widoczne pasma światła rzeczywistej scenerii.
Czujnik obrazu: Czujniki obrazu mogą wykorzystywać funkcję konwersji fotoelektrycznej urządzeń fotoelektrycznych do przekształcania obrazu świetlnego na światłoczułej powierzchni na sygnał elektryczny proporcjonalny do obrazu świetlnego.Dzieli się go głównie na dwa typy: CCD i CMOS.
Procesor sygnału obrazu ISP: wykorzystuje głównie strukturę sprzętową do wstępnego przetwarzania danych w formacie RAW obrazu i źródła wideo wprowadzanego przez czujnik obrazu, które można konwertować do formatu YCbCr i innych.Może także wykonywać różne zadania, takie jak skalowanie obrazu, automatyczna ekspozycja, automatyczny balans bieli i automatyczne ustawianie ostrości.
Serializator: Przesyła przetworzone dane obrazu i może być używany do przesyłania różnych typów danych obrazu, takich jak RGB i YUV.
Złącze: używane do podłączenia kamery stacjonarnej.
Kamery montowane w samochodach mają również wyższe wymagania dotyczące procesów produkcyjnych i niezawodności niż kamery przemysłowe i komercyjne.Ze względu na to, że samochody muszą długo pracować w trudnych warunkach, kamery samochodowe muszą stabilnie pracować w skomplikowanych warunkach pracy, takich jak wysokie i niskie temperatury, silne wibracje oraz wysoka wilgotność i ciepło.Główne wymagania dotyczące produkcji procesowej są następujące:
Wymagania procesowe dla kamer montowanych w samochodach
Odporność na wysoką temperaturę: Kamera montowana w samochodzie musi normalnie działać w zakresie -40 ℃ do 85 ℃ i dostosowywać się do drastycznych zmian temperatury;
Odporność sejsmiczna: Pojazdy mogą generować silne wibracje podczas jazdy po nierównych drogach, dlatego kamera pokładowa musi być w stanie wytrzymać wibracje o różnym natężeniu;
Antymagnetyczne: Kiedy pojazd się uruchomi, wygeneruje niezwykle wysokie impulsy elektromagnetyczne, co wymaga bardzo silnego antymagnetycznegowydajność;
Wodoodporność: Aparat powinien być szczelnie zamknięty, aby zapewnić normalne użytkowanie nawet po kilkudniowym zanurzeniu w wodzie deszczowej;
Żywotność: Aby spełnić wymagania, okres użytkowania musi wynosić co najmniej 8-10 lat;
Ultra szeroki kąt: Kamera surround z widokiem z boku musi być bardzo szerokokątna, z poziomym kątem widzenia wynoszącym 135 °;
Wysoka dynamika: pojazd porusza się z dużą prędkością, a oświetlenie, przed którym stoi kamera, zmienia się dramatycznie i często, co wymaga, aby pamięć CMOS aparatu miała wysoką charakterystykę dynamiczną;
Niski poziom hałasu: może skutecznie tłumić hałas w warunkach słabego oświetlenia, szczególnie wymagając kamer bocznych i tylnych do rejestrowania wyraźnego obrazu nawet w nocy.
Kluczowe parametry inteligentnej głowicy kamery przedniej w pojeździe
Odległość wykrywania
Poziome pole widzenia
Pionowe pole widzenia
Rozdzielczość – gdy kamera rejestruje równomiernie rozmieszczone czarno-białe paski, jest to maksymalna liczba linii, które można zobaczyć na monitorze (wyższa niż rozdzielczość kamery).Gdy liczba linii przekracza tę wartość, na ekranie widoczny jest jedynie szary obszar i nie można już rozróżnić czarnych i białych pasków.
Minimalne oświetlenie — odnosi się do czułości czujnika obrazu na światło otoczenia lub najciemniejszego światła wymaganego do normalnego obrazowania przez czujnik obrazu.Jest to wartość natężenia oświetlenia sceny, gdy poziom sygnału wideo kamery jest niższy niż połowa maksymalnej amplitudy sygnału standardowego, gdy oświetlenie obiektu stopniowo maleje.
Stosunek sygnału do szumu - stosunek napięcia sygnału wyjściowego do jednocześnie wyjściowego napięcia szumu;
Zakres dynamiczny — zakres, w którym wartości jasności najjaśniejszych i najciemniejszych obiektów w tej samej klatce zarejestrowanej przez kamerę umożliwiają normalne wyświetlanie szczegółów.Im większy zakres dynamiczny, tym większy stopień, w jakim obiekty, które są zbyt jasne lub zbyt ciemne, mogą być normalnie wyświetlane na tym samym ekranie.
Jakie są zalety w porównaniu z technologią radarową
1) W porównaniu z radarem działającym na falach milimetrowych, głównymi zaletami obecnych kamer są:
Rozpoznawanie i klasyfikacja celów — obecnie zwykły radar 3D wykorzystujący fale milimetrowe może jedynie wykryć, czy z przodu znajdują się przeszkody, ale nie jest w stanie dokładnie określić rozmiaru i kategorii przeszkód;Na przykład różne rodzaje rozpoznawania pasa ruchu, rozpoznawania sygnalizacji świetlnej i rozpoznawania znaków drogowych;
Detekcja przestrzeni przejezdnej, wydzielenie bezpiecznych granic (obszarów przejezdnych) ruchu pojazdów, głównie dzielących pojazdy, zwykłych krawędzi poboczy, krawędzi krawężników, granic widocznych bez przeszkód i granic nieznanych;
Możliwość wykrywania celów poruszających się poziomo, np. wykrywanie i śledzenie pieszych i pojazdów przekraczających skrzyżowania;
Pozycjonowanie i tworzenie map - czyli technologia.Chociaż obecnie wykorzystuje się radar pracujący na falach milimetrowych, technologia ta jest bardziej dojrzała i ma większe perspektywy zastosowania;
2) W automatycznym układzie napędowym radar laserowy jest podobny do kamery, ale jego zalety to:
Rozpoznawanie sygnalizacji świetlnej i rozpoznawanie znaków drogowych
Przewaga kosztowa i wysoka dojrzałość algorytmów i technologii
Wysoki współczynnik rozpoznawania obiektów
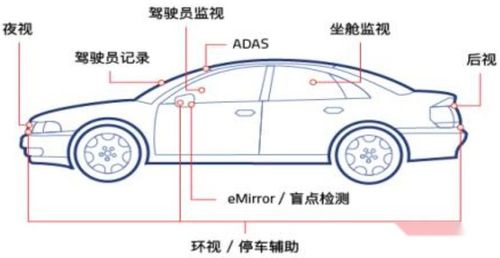
Obecnie kamery montowane w samochodach dzielą się głównie na pięć kategorii w zależności od miejsca instalacji: kamery z widokiem z przodu, kamery z widokiem przestrzennym, kamery cofania, kamery z widokiem z boku i kamery wbudowane.
Kamera widok z przodu: instalowana głównie na przedniej szybie w celu uzyskania funkcji percepcji wizualnej i rozpoznawania podczas jazdy.Można go podzielić na kamerę główną z widokiem z przodu, kamerę wąskokątną z widokiem z przodu i kamerę szerokokątną z widokiem z przodu, zgodnie z ich funkcjami.
Kamera główna skierowana do przodu: Ta kamera jest używana jako kamera główna w systemie ADAS L2.Kąty pola widzenia wynoszą zazwyczaj 30°, 50°, 60°, 100° i 120°, a odległość wykrywania wynosi zazwyczaj 150-170 metrów.Format wyjściowy aparatu.
Kamera szerokokątna skierowana do przodu: Główną funkcją tej kamery jest rozpoznawanie obiektów znajdujących się w bliskiej odległości, używanych głównie w warunkach miejskich, podczas jazdy z małą prędkością i w innych scenach.Jego pole widzenia wynosi od 120° do 150°, a odległość wykrywania wynosi około 50 metrów.Po wielkoformatowym montażu obiektywu 8MP w kolejnych pojazdach kamera ta nie jest już potrzebna.
Kamera wąskokątna z widokiem z przodu: Główną funkcją tej kamery jest rozpoznawanie celów, takich jak sygnalizacja świetlna i piesi.Generalnie stosuje się soczewki o wąskim kącie i można dobierać soczewki w okolicach 30-40°.Piksele tego obiektywu są generalnie takie same, jak piksele przedniego aparatu głównego.Kamera przyjmuje wąski kąt, ma większą gęstość pikseli i większą odległość wykrywania i ogólnie może wykrywać do 250 metrów lub nawet większe odległości.
Po zainstalowaniu kamery 8 MP pole widzenia przedniej kamery głównej może osiągnąć 120°, co może nie być już potrzebne.Odległość wykrywania wynosi około 60 metrów.
Kamera surround: instalowana głównie wokół nadwozia pojazdu, zwykle przy użyciu 4-8 kamer, które można podzielić na kamerę typu rybie oko skierowaną do przodu, kamerę typu rybie oko skierowaną w lewo, kamerę typu rybie oko skierowaną w prawo i kamerę typu rybie oko skierowaną do tyłu.Służy do wyświetlania funkcji panoramicznego widoku panoramicznego, a także percepcji wizualnej i wykrywania obiektów integrujących funkcję parkowania;Powszechnie stosowana matryca kolorów wynika z konieczności przywrócenia koloru.
Kamera cofania: zwykle instalowana na bagażniku, głównie w celu wspomagania parkowania.Kąt pola widzenia wynosi od 120 do 140 stopni, a odległość wykrywania wynosi około 50 metrów.
Boczna kamera przednia: zainstalowana na słupku B lub lusterku wstecznym pojazdu, pole widzenia tej kamery wynosi zazwyczaj 90–100 °, a odległość wykrywania wynosi około 80 metrów.Główną funkcją tej kamery jest wykrywanie pojazdów bocznych i rowerów.
Kamera boczna i tylna: zwykle instalowana na przednim błotniku pojazdu, kąt widzenia tej kamery wynosi zwykle około 90 °, a odległość wykrywania wynosi również około 80 metrów.Stosowany jest głównie do zastosowań scenicznych, takich jak zmiana pasa ruchu pojazdu i wjazd na inne drogi.
Wbudowana kamera: używana głównie do monitorowania stanu kierowcy i uzyskiwania przypomnień o zmęczeniu oraz innych funkcji.
Wśród nich cena kamer przednich jest stosunkowo wysoka, a aktualna cena rynkowa waha się od 300 do 500 juanów;Ceny pozostałych aparatów oscylują w granicach 150-200 juanów.
Z planu widać, że wszystkie 8 kamer jest powiązanych z systemem jazdy, który jest ściśle powiązany z planem czystej jazdy autonomicznej, który był promowany bez polegania na LiDAR.Największą zaletą tego planu jest jego wysoka opłacalność.Dzięki zastosowaniu bardzo taniej, samodzielnie opracowanej kamery, osiągnięto poziom autonomicznej jazdy.
Największą zaletą tego rozwiązania, wykorzystującego wiele kamer, jest jego duża skalowalność.Na wczesnym etapie projektowania trzeba zwiększyć koszty sprzętu, ale w późniejszym etapie jego funkcja autonomicznej jazdy charakteryzuje się bardzo dobrą kompatybilnością i skalowalnością.
Dzięki temu modelowi czujników osiągnięto poziom funkcji jazdy autonomicznej charakteryzujący się dobrymi doświadczeniami, w tym bardzo charakterystyczną, szybką autonomiczną jazdę nawigacyjną (NGP) i funkcję parkowania z pamięcią parkingu.
Klasa S jest przedstawicielem tradycyjnych rozwiązań OEM, a rozwiązanie lornetkowej kamery stereoskopowej to największa zaleta Mercedesa Klasy S.W porównaniu do kamer monokularowych, kamery lornetkowe mogą obliczać ruch aktualnie wykrytego celu we współrzędnych X, Y i Z, określać postawę i typ wykrytego celu, a efekt doświadczenia funkcji ADAS Mercedes Benz na poziomie L2 jest też lepszy od pozostałych dwóch.
Analizując rozwiązania kamer w modelach samochodów produkowanych masowo, odkryliśmy, że wszystkie one wykorzystują kamery o średniej i niskiej liczbie pikseli w celu realizacji funkcji autonomicznej jazdy.
Saitemei Security Electronics Co., Ltd. Sieć branżowa kamer samochodowych
Łańcuch branży kamer samochodowych składa się głównie z trzech głównych ogniw: materiałów wyższego szczebla, komponentów średniego szczebla i produktów końcowych.
Materiały wyjściowe, takie jak soczewki optyczne, filtry i folie ochronne, są wykorzystywane do produkcji zespołów soczewek, natomiast płytki są wykorzystywane do produkcji układów CMOS i procesorów sygnałowych DSP;Zmontuj zespół obiektywu środkowego, chipy CMOS i materiały samoprzylepne w moduły i spakuj je za pomocą procesorów sygnałowych DSP w produkty kamerowe.
Na tym poziomie łańcucha przemysłowego dostawcy wyższego szczebla mogą już dostarczać kompletne produkty kamer klientom będącym na dalszym etapie łańcucha dostaw lub będącym dostawcami pierwszego poziomu.W łańcuchu branży kamer samochodowych kamery i algorytmy oprogramowania razem stanowią rozwiązanie kamery samochodowej, które jest stosowane w pojazdach autonomicznych.
Obecnie wszystkie firmy posiadające duży udział w rynku kamer samochodowych są wiodącymi światowymi dostawcami komponentów pierwszego rzędu, a klientami na niższym szczeblu łańcucha dostaw są w zasadzie największe światowe firmy motoryzacyjne.
CMOS ma najwyższy stosunek wartości do ceny wśród kamer samochodowych, sięgający 52%;Opakowanie modułów stanowi 20%, a soczewki optyczne 19%.
Układ CMOS
CMOS (czujnik CIS) to popularne rozwiązanie w zakresie komponentów światłoczułych do kamer samochodowych.W porównaniu do światłoczułych komponentów CCD, CMOS ma nieco gorszą jakość obrazu, ale jest tani i bardziej energooszczędny, co czyni go powszechnie preferowanym w dziedzinie kamer samochodowych o niskich wymaganiach dotyczących pikseli.
Podstawowa budowa czujników obrazu
Przetwornik obrazu jest podzielony na obszar światłoczuły (Firecore), przewody wiążące, obwód wewnętrzny i podłoże ze względu na wygląd.Obszar światłoczuły to układ pojedynczych pikseli składający się z wielu pojedynczych punktów pikseli.Kiedy sygnały świetlne uzyskane z każdego piksela zostaną zebrane razem, tworzą pełny obraz.
Schemat przekroju układu CMOS
Ze względu na różne kąty padania światła na każdy pojedynczy piksel, na powierzchni każdego pojedynczego piksela dodawana jest mikrosoczewka, która koryguje kąt padania światła, umożliwiając światłu wnikanie pionowo na powierzchnię światłoczułego elementu.Jest to koncepcja chipa, który należy trzymać w niewielkim zakresie odchylenia od obiektywu
Jeśli chodzi o architekturę obwodów, czujnik obrazu ma postać ciemnej skrzynki, która przetwarza sygnały świetlne na sygnały elektryczne.Zewnętrzne elementy ciemnej skrzynki obejmują zazwyczaj obwody zasilania, danych, zegara, komunikacji, sterowania i synchronizacji.Można to po prostu rozumieć jako konwersję przez Firecore sygnałów świetlnych na sygnały elektryczne, które są przetwarzane i kodowane przez obwód logiczny w ciemnej skrzynce, a następnie wysyłane przez interfejs danych.
Ze względu na podobieństwo procesu projektowania warstwy pikseli w układach CMOS do układów analogowych, stawiane są wysokie wymagania procesom produkcyjnym
Główni dostawcy.
Technologia produkcji i wytwarzania CMOS jest wysoka i z perspektywy rynku globalnego jest obecnie zajmowana głównie przez przedsiębiorstwa finansowane z zagranicy.Z punktu widzenia krajobrazu konkurencyjnego, Saitemei zajmuje pierwsze miejsce z udziałem w rynku wynoszącym 36%, a tuż za nim plasuje się krajowe przedsiębiorstwo Huoxin Technology z udziałem w rynku wynoszącym 22%.Globalni dostawcy stanowią ponad 65%, przy dużej koncentracji przemysłu.Krajowe przedsiębiorstwo Saitemei Security Electronics Co., Ltd. stało się wiodącym przedsiębiorstwem w tej dziedzinie.

 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków!